Diese Woche habe ich mich mit einem Projekt beschäftigt, welches vermutlich bei der derzeitigen Preisentwicklung was Staubsaugerroboter angeht nicht mehr wirklich ins Gewicht fällt, da Staubsaugerroboter mit Ladestation und Alexa Integration inzwischen zu wirklich erschwinglichen Preisen erhältlich sind. Wer also mit dem Gedanken Spiel sich ein neues Gerät zu kaufen und dieses evtl. auch mal über Alexa zu steuern, der sollte sich auf jeden Fall gleich für ein Modell wie z.B. den ECOVACS Robotics DEEBOT N79S Saugroboter entscheiden. Da hier alles wie gewollt Funktioniert.

Auch wer einen älteren Staubsaugerroboter mit einer Infrarotfernbedienung besitzt, kann diesen ganz einfach über einen Broadlink RM Pro oder RM Mini aus meinem Artikel vom 10.03.2019 steuern, hierzu muss die Ladestation des Staubsaugerroboters lediglich so stehen, das der RM Pro oder RM Mini ein Infrarot Signal an den Staubsauger schicken können.
Wer aber wie ich noch einen voll Funktionstüchtigen Staubsaugerroboter wie z.B. den Dirt Devil Spider zuhause hat, und diesen wie in meinem Fall nicht nach dem Kauf eines neuen Gerätes in der Schublade versauern lassen möchte, sondern evtl. noch als Zweitgerät für einen anderen Raum nutzen möchte, für den habe ich heute eine kleine Anleitung, wie man einen Alten Staubsauger mit relativ einfachen Mitteln um eine Ladestation erweitern kann und auch noch eine Alexa Steuerung verwirklichen kann.
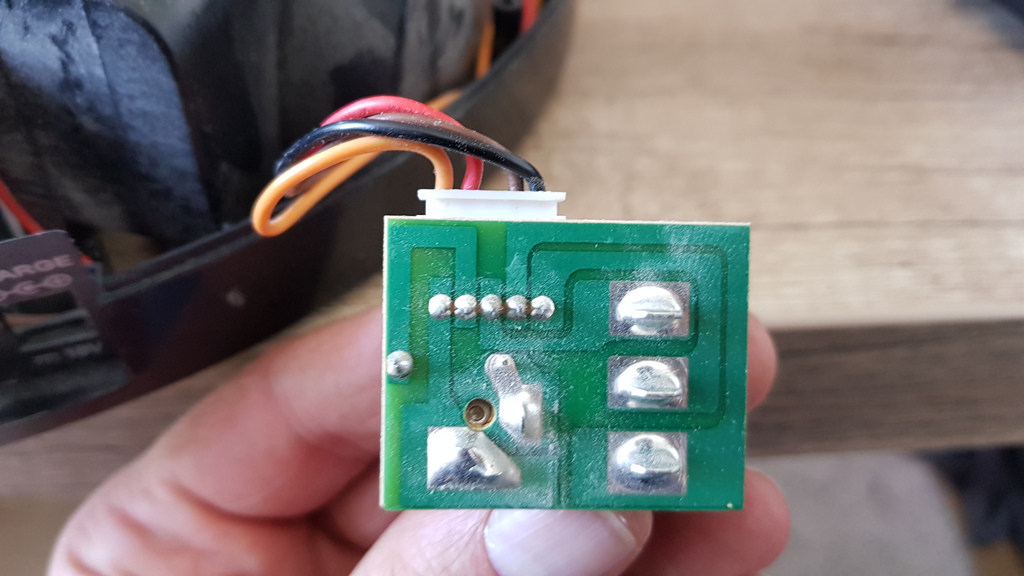
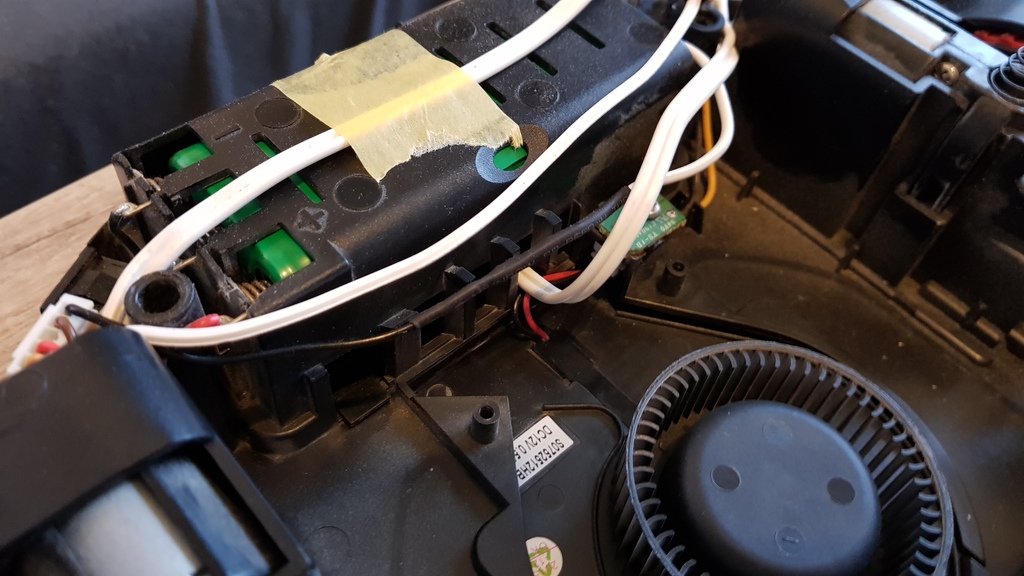
Mein Grundgedanke war, die Steuerleitung des Staubsaugerroboters welche vom Ein- / Ausschalter aus zu irgend einer Steuerplatine geht einfach über ein Wlan Relais Modul (Beitrag vom 14.04.2019) zu schalten, so dass der Roboter per Alexa gestartet werden kann. Hierzu habe ich also den Dirt Devil Spider komplett aufgeschraubt, und an der im Bild sichtbaren Schwarzen Leitung welche eine der Beiden Leitungen am Kippschalter ist ein Kabel eingelötet, welches ich beim Zusammenbau nach außen Geführt habe, um meine ersten Versuche durchzuführen.


Für meinen ersten Test habe ich nun also das von mir eingebaute Steuerkabel an mein Wlan Relais Modul (Beitrag vom 14.04.2019) angeschlossen, und zu Testzwecken das Releaismodul erst mal mit einer Powerbank mit Strom Versorgt. Das Ergebnis dieses Versuches habe ich natürlich in einem kleinen Video festgehalten.
An zweiter Stelle war es natürlich nur logisch, dass ein automatisch startender Roboter auch eine Ladestation braucht, von der er einfach herunterfahren kann, so das ich mich nicht mehr um das Ausstecken des Kabels kümmern muss. Hierzu muss ich allerdings sagen, dass für mich ein automatisches Anfahren der Ladestation zwar Technisch möglich ist, in diesem Projekt aber erst ein mal nicht mitbetrachtet wurde. Wenn ihr hierzu noch ein zweites Projekt sehen möchtet, in dem ich auch dies verwirkliche, dann hinterlasst mir am ende Des Beitrags oder auf Facebook einen Kommentar, dann werde ich auch dieses Projekt in Angriff nehmen.
Um nun den Dirt Devil Spider automatisch von der Ladestation fahren zu lassen, und keine Powerbank mehr zu benötigen war mein Gedanke, die Stromversorgung des Relaismoduls mit über das Netzteil des Dirt Devils zu speisen, da das Relaismodul eine Eingangsspannung von 5V – 32V verkraftet, und das Netzteil des Roboters eine Spannung von 19V hat. Hierzu habe ich in der App das Relais auf Standardmäßig ON geschaltet und den Öffnerport des Relais als Schaltleitung verwendet. Da das Relaismodul ja beim herunterfahren von der Ladestation auch seine Stromversorgung verlieren wird.

So weit so gut, nachdem ich hierzu meinen zweiten Testaufbau fertig hatte und testen wollte, fiel mir mein Denkfehler auf. Da diese Alten Geräte nicht losfahren sollten, während sie geladen werden, da sie ja sonst das Ladekabel beschädigen könnten, wurde hier eine Sicherheitsschaltung integriert, welche das Einschalten des Roboters währen er am Ladegerät hängt verhindert.
Nun war ein kurzes Umdenken angesagt. Nachdem ich aber immer ein paar Funk- oder WLAN Steckdosen (Beitrag vom 31.03.2019) herumliegen habe entschied ich mich dazu erst ein mal zu testen was Passiert, wenn ich die Stromzufuhr einfach durch eine Steckdose unterbreche. Aufgrund der vorhin erklärten Schaltung über den Öffner Port des Relais funktionierte das Abschalten der Stromzufuhr über eine Wlan Steckdose natürlich sofort, ohne weitere Änderung an meinem Versuchsaufbau.
Da in dieser Konstellation nun das Wlan Relais Modul (Beitrag vom 14.04.2019) vollkommen überdimensioniert ist, da die Schaltung nur noch über den Stromverlust des Relaismoduls ausgelöst wird, war klar, das zum starten des Roboters nur noch ein normales Wechsel- oder Öffnerrelais benötigt wird, welches einfach die Steuerleitung des Roboters auf ON schaltet, sobald die Stromversorgung abgeschaltet wird. Somit habe ich mir einfach ein 24V Wechselrelais aus dem KFZ Bereich bestellt um dieses für diesen Zweck zu nutzen.

Während ich nun auf mein Relais wartete, hab ich natürlich die Zeit weiter genutzt, um schon mal meine provisorische Ladestation in eine richtige Ladestation für den Roboter umzuwandeln. Da ich in meinem Keller eine relativ große Digitale Carrera Anlage habe, liegen dort auch immer ein paar Ersatzteile wie Schleifer und unbenutzte Schienenteile herum. Also kam ich relativ schnell auf den Gedanken, das dies eigentlich die ideale Basis für eine Ladestation wäre.
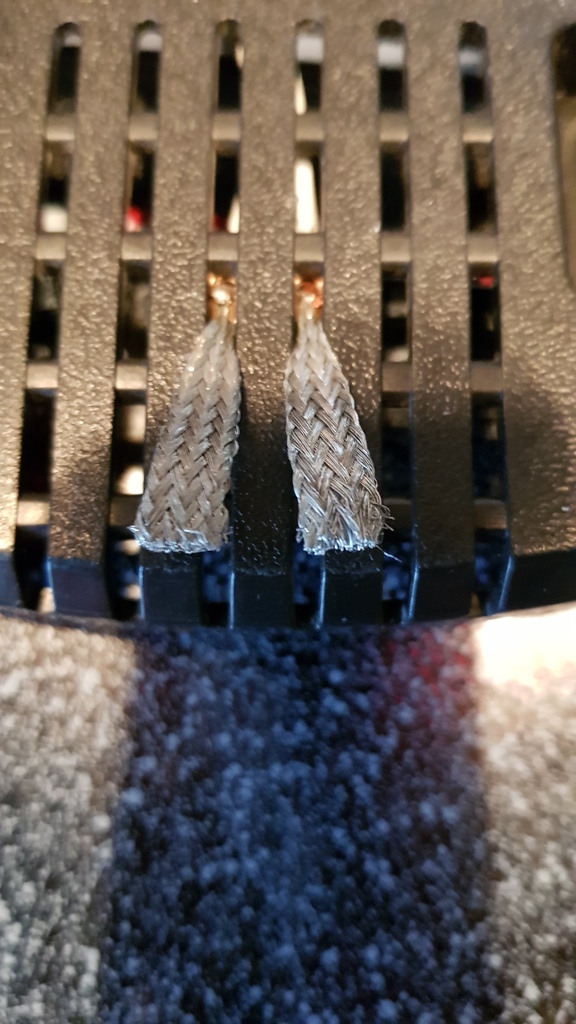
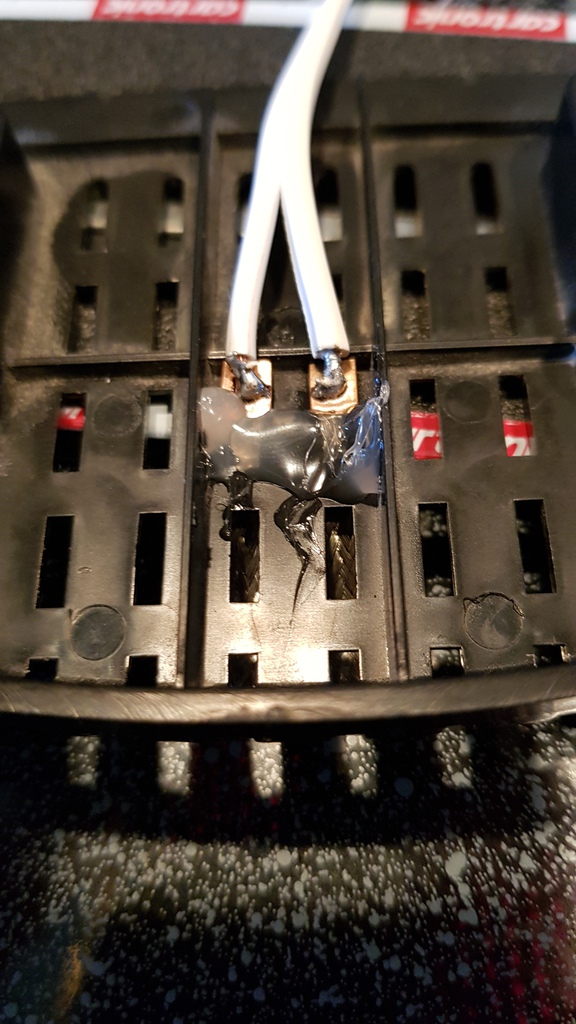

Die Abnehmer habe ich also in der Batterieabdeckung des Roboters durch die Lüftungsschlitze gezogen, von innen mit Heißkleber fixiert, anschließend ein Kabel angelötet und alles noch mal ordentlich mit Heißkleber Isoliert und stabilisiert, so dass hier definitiv kein Kurzschluss mehr entstehen sollte. Hier möchte ich auch noch erwähnen, dass der Ladeanschluss keinen Strom führt, so lange kein Ladegerät angeschlossen ist, somit kann also auch nichts passierte, sollten beim Saugen mal die beiden Schleifer Kontakt bekommen.


Als Ladestation habe ich nun einfach eine abgeschnittene Einzelschiene mit Heißkleber in einem zugeschnittenen Kunststoff Leergehäuse fixiert und die Kabel des Netzteils an die Schienen angelötet. Wer einen 3D Drucker besitzt, kann her zwar bestimmt eine noch schönere Ladestation hervorzaubern, aber diese Lösung empfinde ich auf jeden Fall als optisch gute Alternative.

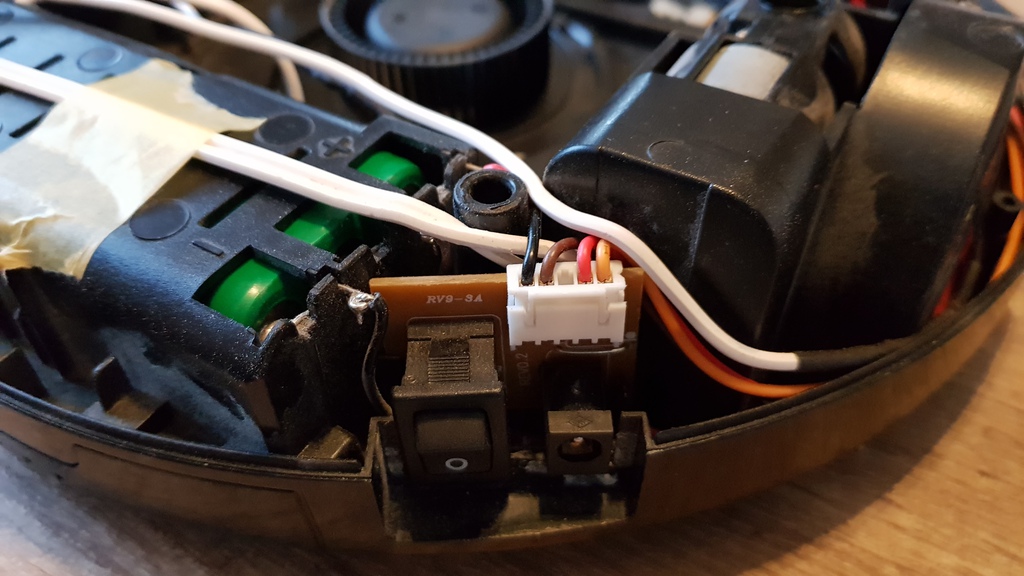
Nun habe ich nur noch das Kabel der Beiden Stromabnehmer mit Klemme 85 und 86 des Relais verbunden und von dort aus weiter an die Ladebuchse des Dirt Devil Spider geführt. Das von mir angebrachte Steuerkabel habe ich an Klemme 30 und 87a des Relais gelötet. Hier ist es mir noch ein mal wichtig zu sagen, dass die Steuerleitung nicht Parallel zum Original Schalter sondern in Reihe geschaltet wird, da man somit auch über den original Schalter den Roboter noch abschalten kann, falls dieser einmal ausgeschaltet nicht in der Ladestation stehen soll.

Aus meinem täglichen Leben:
Da meine Katzen nicht in mein Schlafzimmer dürfen, und der Dirt Devil Spider seit meinem neuen Staubsaugerroboter nur noch im Schrank lag, habe ich mir mit dieser Umbaumaßnahme nun einen Zweiten automatisierbaren Staubsaugerroboter geschaffen, welchen ich nun in meiner Abwesenheit im Schlafzimmer saugen lassen kann, ohne die Tür zum Schlafzimmer offen stehen zu lassen. Natürlich muss ich ihn bei der momentanen Ausbaustufe immer noch am Abend zurück in die Ladestation stellen, dies ist aber definitiv weniger aufwand als mit Ladekabel und manuellem Einschalten beim verlassen der Wohnung. Somit habe ich mir mit relativ geringem Kostenaufwand einen moderneren Staubsaugerroboter geschaffen, welcher mir wieder ein mal Zeit spart. Und hier seht ihr noch mal das Ergebnis im Video
Könnte dich auch interessieren:









Hallo,
Wie bekomme ich den Deckel unter dem Stoßbügel raus?
Herzlichen Dank für die Antwort?
Du musst an dem Stoßbügel das rote Gummi herausziehen. Darunter befinden sich dann noch 2 Schrauben, mit denen du den Stoßbügel entfernen kannst.
Hi,
Erstmal tolle Idee und guter Artikel.
Ich würde das Projekt gerne nachmachen hab aber noch eine Frage.
Und zwar ist es mir nicht ganz ersichtlich wo genau du im ersten Schritt (mit dem WLAN Relais Modul) die Leitungen für den Common- und den NO (Normally Open) Pin des Relais angelötet hast.
Wäre nett wenn du das nochmal etwas genauer beschreiben könntest.
Danke schonmal im Vorraus.
Hi Thomas,
Interessanter Blog, vielen Dank. Mit 2 Katzen und drei Personen fällt bei uns einiger Schmutz an. Auch kleinere Wollmäuse verstopfen öfter die Ansaugöffnung. Dann blinkt ja die mittlere LED. DasBevor ich selbst tüftel dachte ich ich frag mal dich mit Deiner Erfahrung… 😇
Kann ich dann hier ein akustisches Signal ausgeben? Man muss sonst ja immer hinterher schauen ob der sauger nicht gerade verstopft ist und sinnlos den Dreck rumschiebt. Am besten mit einer kleinen Verzögerung damit er nut dann piept wenn er wirklich verstopft ist.